![]()
This example uses the following libraries:
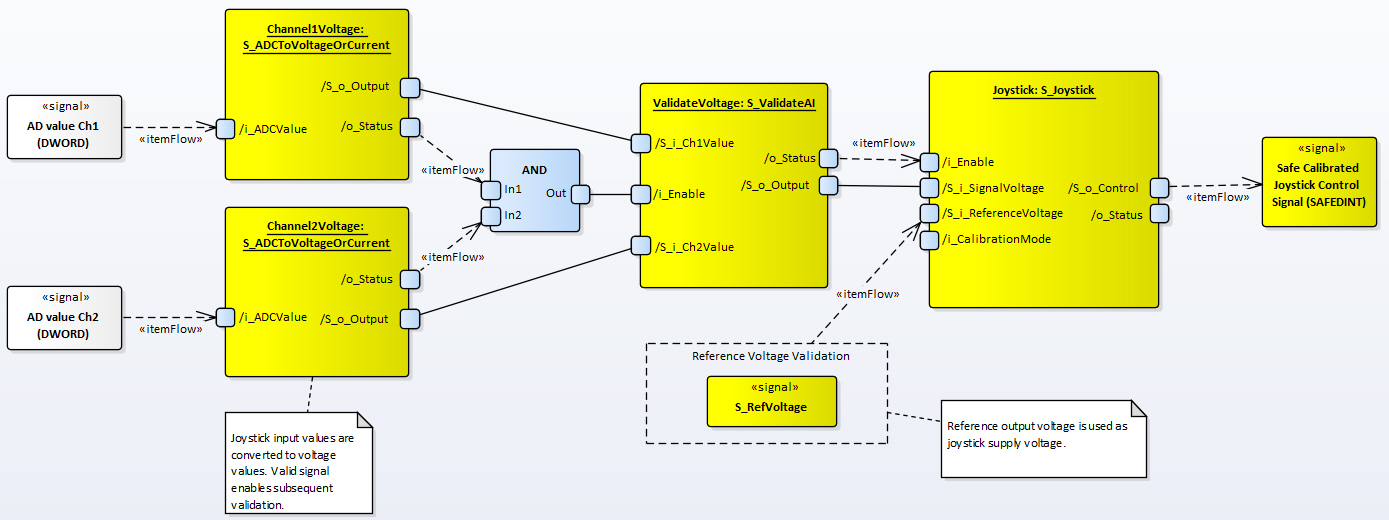
SafeConversion library
SafeDataValidation library
-
S_ValidateAI (FB)
SafeJoystickCalibrationAndDiagnostic library
-
S_Joystick (FB)
, or alternatively non-safe library
SensorsAndActuators library
-
Joystick2ChCompare (FB)