![]()
Sensor hardware errors are diagnosed with SafeConversion library's function blocks S_ADCToVoltageOrCurrent or S_VoltageToResistance.
Supported platforms: CODESYS 3.5, CODESYS 3.5 SAFETY, CODESYS 3.5 SP19 SAFETY
This function is used to calibrate linearly the sensor value (mV, µA, mΩ) to other physical unit (℃, bar, km/h, kg, etc.).
To operate correctly it is required that sensor operates linearly or at least almost linearly.
The input value is calibrated from the input scale to the output scale according the input parameters. Both the negative and the positive slope are supported.
|
|
Sensor hardware errors are diagnosed with SafeConversion library's function blocks S_ADCToVoltageOrCurrent or S_VoltageToResistance. |
|
|
Sensor value alarms and warnings are diagnosed with SafeDataValidation library function block S_ValueDiagnostic. |
|
Input variable name |
Data type |
Unit |
Range |
Description |
|
S_i_InputValue |
SAFEDINT |
mV, µA, mΩ |
- |
Sensor value. |
|
S_i_InputMin |
SAFEDINT |
mV, µA, mΩ |
- |
Sensor minimum value |
|
S_i_InputMax |
SAFEDINT |
mV, µA, mΩ |
- |
Sensor maximum value |
|
S_i_OutputMin |
SAFEDINT |
- |
- |
Minimum output value, corresponds to S_i_InputMin |
|
S_i_OutputMax |
SAFEDINT |
- |
- |
Maximum output value, corresponds to S_i_InputMax |
|
Data type |
Range |
Description |
|
SAFEDINT |
-2140000000 – |
Calibrated value. Note! Value is not limited between S_i_OutputMin and S_i_OutputMax |
No errors.
|
|
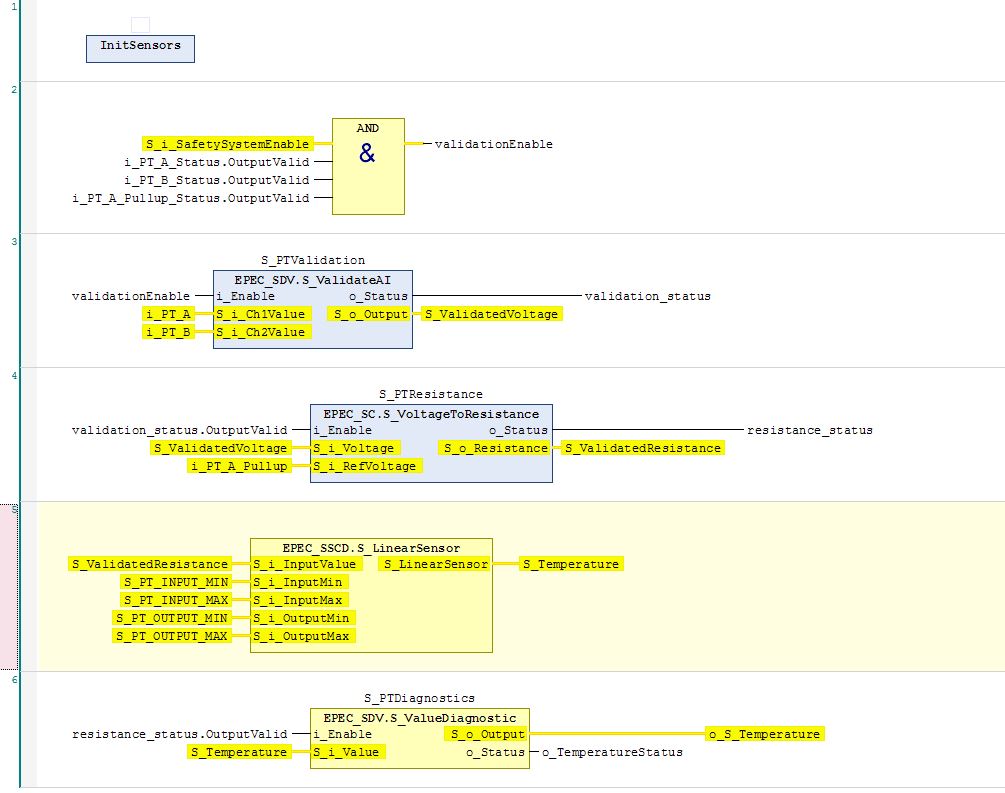
This example contains the validation of 2 linear PT sensors voltage signals, conversion from voltage to temperature and the diagnostic of temperature value . |
|
Safe definitions: |
|
PROGRAM S_TemperaturePT VAR_INPUT S_i_SafetySystemEnable: SAFEBOOL := FALSE; i_PT_A: SAFEDINT := DINT#0; (*PT sensor A voltage signal mV*) i_PT_A_Pullup: SAFEDINT := DINT#0; (*Sensor reference voltage mV*) i_PT_B: SAFEDINT := DINT#0; (*PT sensor B voltage signal mV*) i_PT_A_Status: EPEC_SC.Status; i_PT_A_Pullup_Status: EPEC_SC.Status; i_PT_B_Status: EPEC_SC.Status; i_pEventCodePT_A: POINTER TO EPEC_DITF.EventCode := DWORD#0; i_pEventCodePT_B: POINTER TO EPEC_DITF.EventCode := DWORD#0; END_VAR VAR_OUTPUT o_S_Temperature: SAFEDINT; o_TemperatureStatus: EPEC_SDV.Status; END_VAR VAR initDone: BOOL; validationEnable: BOOL; S_ValidatedVoltage: SAFEDINT; S_ValidatedResistance: SAFEDINT; S_Temperature: SAFEDINT; validation_status: EPEC_SDV.Status; resistance_status: EPEC_SC.Status; S_PTValidation: EPEC_SDV.S_ValidateAI; S_PTResistance: EPEC_SC.S_VoltageToResistance; S_PTDiagnostics: EPEC_SDV.S_ValueDiagnostic; END_VAR VAR CONSTANT S_AI_TOLERANCE: SAFEDINT := DINT#100; (*PT1000 res - celsius scaling parameters*) S_PT_INPUT_MIN: SAFEDINT := DINT#882000; S_PT_INPUT_MAX: SAFEDINT := DINT#1117000; S_PT_OUTPUT_MIN: SAFEDINT := DINT#-30; S_PT_OUTPUT_MAX: SAFEDINT := DINT#30;
END_VAR
|
|
Init at safe PRG: |
|
IF NOT initDone THEN initDone := TRUE;
S_PTValidation.Init( S_i_InvertedCh2 := FALSE, S_i_DiagnosticDelay := EPEC_HW.Constants.G_VOLTAGE_INPUT_DIAGNOSTIC_DELAY, S_i_SafeOutputValue := EPEC_HW.Constants.G_VOLTAGE_INPUT_SAFE_VALUE, S_i_Tolerance := S_AI_TOLERANCE, S_i_SumValue := DINT#0, i_pEventCode := i_pEventCodePT_A, i_pEventCodeCh2 := i_pEventCodePT_B );
S_PTResistance.Init( S_i_InternalPullUpResistance := EPEC_HW.PULL_UP_RESISTANCE.R_2K2, S_i_InternalPullDownResistance := EPEC_HW.PULL_DOWN_RESISTANCE.R_82K, S_i_OutputResistanceHigh := DINT#1400, S_i_OutputResistanceLow := DINT#843, S_i_DiagnosticDelay := UINT#1000, i_pEventCode := i_pEventCodePT_A );
S_PTDiagnostics.Init( S_i_HighErrorLimit := DINT#100, S_i_LowErrorLimit := DINT#-40, S_i_EnableHighError := TRUE, S_i_EnableLowError := TRUE, S_i_DiagnosticDelay := UINT#1000, S_i_SafeOutputValue := DINT#0, i_pEventCode := i_pEventCodePT_A );
END_IF
|
|
Code at safe PRG: |
|
|
Source file topic100407.htm
Last updated 4-Sep-2025