|
IF bInit THEN
bInit := FALSE;
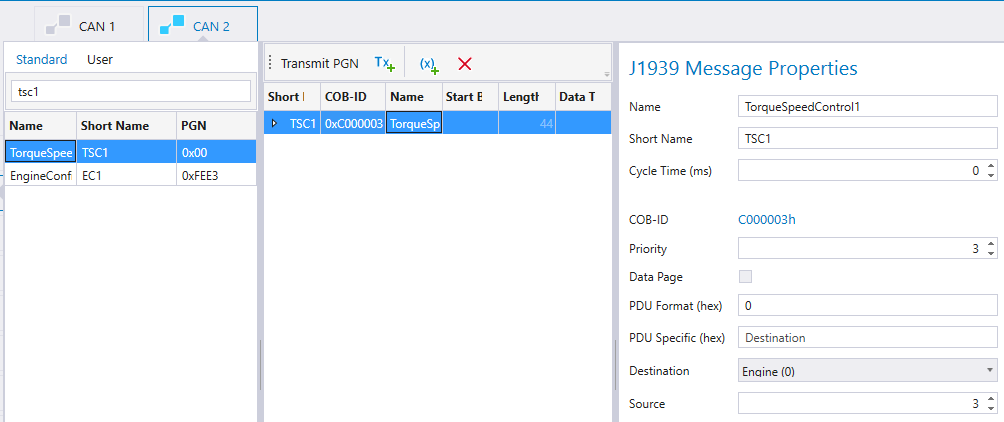
(* Set TSC1 PGN *)
(* Time triggered CAN message supports only data length <= 8 *)
IF J1939_CAN2.Out.Engine.PGN_TSC1.DataLength <= 8 THEN
(* Set cycle time to 0ms to prevent message sending by J1939 server *)
J1939_CAN2.Out.Engine.PGN_TSC1.CycleTime := 0;
(* Set data length *)
tsc1CanApiHandler.i_Dlc := WORD_TO_BYTE(J1939_CAN2.Out.Engine.PGN_TSC1.DataLength);
(* Set init data for message *)
EPEC_J1939.J1939_BuildPGN(
i_pBasePGN := ADR(J1939_CAN2.Out.Engine.PGN_TSC1),
i_pDataBuffer := ADR(tsc1CanApiHandler.i_Data)
);
(* Init cobid for time triggered message *)
(* build used cobid from PGN *)
usedCobId:=BYTE_TO_DWORD(J1939_CAN2.Out.Engine.PGN_TSC1.Priority);
usedCobId:=SHL(usedCobId,1) OR 0;
usedCobId:=SHL(usedCobId,1) OR BYTE_TO_DWORD(J1939_CAN2.Out.Engine.PGN_TSC1.DataPage);
usedCobId:=SHL(usedCobId,8) OR WORD_TO_DWORD(SHR(J1939_CAN2.Out.Engine.PGN_TSC1.PGN_Number,8) AND 16#FF);
IF 16#F000 > J1939_CAN2.Out.Engine.PGN_TSC1.PGN_Number THEN
usedCobId:=SHL(usedCobId,8) OR BYTE_TO_DWORD(J1939_CAN2.Out.Engine.PGN_TSC1.Destination);
ELSE
usedCobId:=SHL(usedCobId,8) OR WORD_TO_DWORD(J1939_CAN2.Out.Engine.PGN_TSC1.PGN_Number AND 16#FF);
END_IF
usedCobId := SHL(usedCobId,8) OR BYTE_TO_DWORD(J1939_CAN2.Out.Engine.PGN_TSC1.SourceAddress);
usedCobId := usedCobId OR EPEC_CANVXD.MASK_29BIT; (* Set bit on which defines message as 29bit *)
(* Init time triggered message *)
tsc1CanApiHandler.InitCobId(
i_CanChannel := 1, (*CAN2*)
i_CobId := usedCobId,
i_TimeInterval := T#10MS
);
tsc1CanApiHandler.i_Enable := TRUE;
END_IF
ELSE
(* J1939 variables are accessed normally through J1939 structure*)
J1939_CAN2.Out.Engine.TSC1_EngRqedSpeed_SpeedLimit := WORD#1000 * 8; (*1000 rpm to raw value*)
(* Update PGN data to Api handler input*)
EPEC_J1939.J1939_BuildPGN(
i_pBasePGN := ADR(J1939_CAN2.Out.Engine.PGN_TSC1),
i_pDataBuffer := ADR(tsc1CanApiHandler.i_Data)
);
(* Function block instance must be called at least with 100ms interval *)
tsc1CanApiHandler();
END_IF
|