Supported platforms: CODESYS 3.5, CODESYS 3.5 SAFETY, CODESYS 3.5 SP19 SAFETY
S_EndAttenuation (FB)
Description
This function block limits proportional control value when movement is near the end position.
Initialization
Init method is used to initialize the necessary static calculation parameters for the function block instance.
The method shall be called at least once before the actual function block can be called, i.e. at the application initialization phase.
The method checks the validity of input parameters. However, none of the function block outputs are affected by the initialization.
|

|
A parameter error is diagnosed if:
-
Init method is not called before the main FB call OR
-
i_pEventCode = 0 OR
-
i_pEventCodePosDirAtt = 0 OR
-
i_pEventCodeNegDirAtt = 0 OR
-
S_i_PosDirAttenuationLimit is out of range OR
-
S_i_NegDirAttenuationLimit is out of range
|
Initialization parameters
|
Parameter
|
Data type
|
Unit
|
Range
|
Description
|
|
S_i_PosDirAttenuationLimit
|
SAFEUINT
|
%
|
0-100
|
Attenuated positive direction maximum control value. Percent from value 10000.
|
|
S_i_NegDirAttenuationLimit
|
SAFEUINT
|
%
|
0-100
|
Attenuated negative direction minimum control value. Percent from value -10000.
|
|
i_pEventCode
|
POINTER TO EventCode
|
-
|
≠0
|
Pointer to application variable which is type EventCode.
|
|
i_pEventCodePosDirAtt
|
POINTER TO EventCode
|
-
|
≠0
|
Pointer to application variable which is type EventCode.
|
|
i_pEventCodeNegDirAtt
|
POINTER TO EventCode
|
-
|
≠0
|
Pointer to application variable which is type EventCode.
|
Initialization method return value
|
TRUE: All initialization parameters ok.
|
|
FALSE: Error in initialization parameter(s).
|
Operation
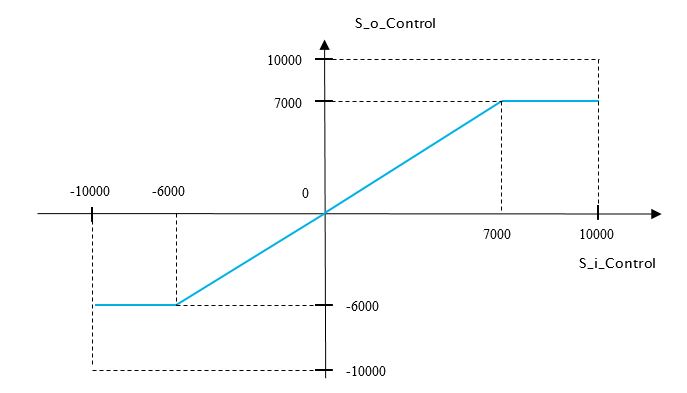
The output value S_o_Control is limited to the given percentage (S_i_PosDirAttenuationLimit) of the positive max control value if the S_i_Control value is higher than limited value and the corresponding end attenuation flag S_i_PosDirAttenuationOn is true. S_o_Control is limited to given percentage (S_i_NegDirAttenuationLimit) of negative min control value if the S_i_Control value is lower than limited value and the corresponding end attenuation flag S_i_NegDirAttenuationOn is true. Otherwise S_o_Control follows the input value S_i_Control.
See figure below where S_i_PosDirAttenuationLimit = 70 and S_i_NegDirAttenuationLimit = 60 and the corresponding end attenuation input is true when end attenuation limit is reached.
Inputs
|
Input variable name
|
Data type
|
Unit
|
Range
|
Description
|
|
i_Enable
|
BOOL
|
-
|
-
|
Enable POU operation
|
|
S_i_Control
|
SAFEINT
|
-
|
-10000 - (+)10000
|
Control value
|
|
S_i_PosDirAttenuationOn
|
SAFEBOOL
|
-
|
-
|
Positive direction end attenuation is active
|
|
S_i_PosDirAttenuationOn
|
SAFEBOOL
|
-
|
-
|
Negative direction end attenuation is active
|
Outputs
|
Output variable name
|
Data type
|
Unit
|
Range
|
Description
|
|
S_o_Control
|
SAFEINT
|
-
|
-10000 - (+)10000
|
Attenuated control value
|
|
o_Status
|
Status
|
-
|
|
Status of output value. See Status structure.
|
Error diagnostic
See Diagnostic Interface library description of error status and event code functionality.
|
Conditions
|
S_o_
Control
|
o_Status. OutputValid
|
o_Status error status
|
Event code FunctionID
|
Event code EventID
|
|
i_Enable TRUE AND
init parameter error AND
i_pEventCode valid
|
0
|
FALSE
|
ParameterError
|
END_ATTENUATION
|
PARAMETER_ERROR
|
|
i_Enable TRUE AND
init parameter error AND
i_pEventCode NULL
|
0
|
FALSE
|
ParameterError
|
-
|
-
|
|
i_Enable TRUE AND
init parameters ok AND
S_i_Control within range
|
Attenuated control value
|
TRUE
|
-
|
NO_FUNC
|
NO_ERROR
|
|
i_Enable TRUE AND
init parameters ok AND
S_i_Control > 10000
|
0
|
FALSE
|
InputHigh
|
END_ATTENUATION
|
INPUT_TOO_HIGH
|
|
i_Enable TRUE AND
parameters ok AND
S_i_Control < -10000
|
0
|
FALSE
|
InputLow
|
END_ATTENUATION
|
INPUT_TOO_LOW
|
See also
Source file topic100405.htm
Last updated 4-Sep-2025