![]()
This FB exists in library version 1.1.0.0 or newer.
Supported platforms: CODESYS 3.5, CODESYS 3.5 SAFETY, CODESYS 3.5 SP19 SAFETY
|
|
This FB exists in library version 1.1.0.0 or newer. |
This function block can be used to filter out switch bouncing in digital inputs caused by mechanical contacts in buttons, relays, etc… POU contains two different filtering modes: Debounce and Debounce_Fast.
Init method is used to initialize the necessary static calculation parameters for the function block instance.
The method shall be called at least once before the actual function block can be called, i.e. at the application initialization phase.
The method checks the validity of input parameters. However, none of the function block outputs are affected by the initialization.
|
|
A parameter error is diagnosed if:
|
|
Parameter |
Type |
Unit |
Range |
Description |
|
S_i_DebounceDelay |
SAFEUINT |
ms |
- |
Max assumed bouncing time of the contact device connected to input pin |
|
i_FilterRype |
DebounceFilterType |
- |
- |
The selected debounce filter type. Either Debounce or Debounce_Fast. |
|
i_pEventCode |
POINTER TO EventCode |
- |
≠0 |
Pointer to application variable which is type EventCode. |
|
TRUE: All initialization parameters ok. |
|
FALSE: Error in initialization parameter(s). |
This FB is in the normal operation mode when the input i_Enable is TRUE and all input parameters are valid. In normal operation mode the FB filters out the DI debouncing and returns filtered DI status. FB contains two different options for filtering: Debounce and Debounce_Fast.
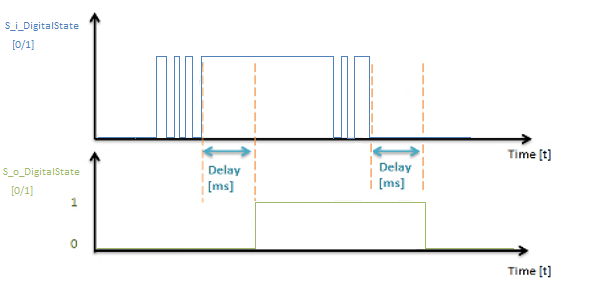
Above picture demonstrates the voltage behaviour in inputs caused by bouncing of mechanical contact in, for example, button, relays, etc... Purpose of this POU is filter this bouncing out to get stable boolean status.
This shall be achieved by waiting that input has stopped bouncing and the value is stable.
The input state must be stable for a given time before the output state is changed.
The output is activated when the input value has been true continuously for the given time of S_i_DebounceDelay.
The output is deactivated when the input value has been false continuously for the given time of S_i_DebounceDelay.
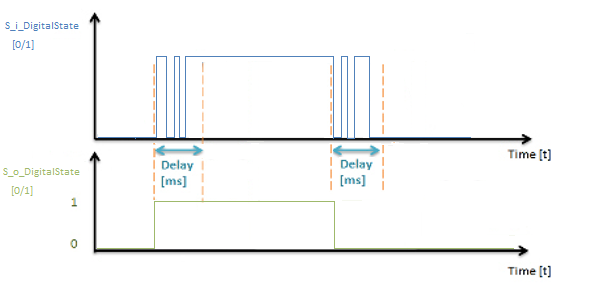
Above picture demonstrates the voltage behaviour in inputs caused by bouncing of mechanical contact in, for example, button, relays, etc... Purpose of this POU is this filter this bouncing out to get stable Boolean status.
This shall be achieved by limiting how frequently output state can change.
Output state changes equal to input on the rising or falling edge of the change. After this there is an adjustable delay (S_i_DebounceDelay) in which time the output state is not changed regardless of the input state. After the delay, the cycle starts again. So, after each change of output there is a time delay before the output can be changed again.
|
Input variable name |
Data type |
Range |
Description |
|
i_Enable |
BOOL |
TRUE / FALSE |
Enable conversion |
|
S_i_DigitalState |
SAFEBOOL |
TRUE / FALSE |
DI status without debounce |
|
Output variable name |
Data type |
Range |
Description |
|
S_o_DigitalState |
SAFEBOOL |
TRUE / FALSE |
De-bounced DI status |
|
o_Status |
Status |
- |
Status of output value. See Status structure. |
See Diagnostic Interface library description of error status and event code functionality.
|
Conditions |
S_o_Digital State |
o_Status. OutputValid |
o_Status error status |
Event code FunctionID |
Event code EventID |
|
i_Enable TRUE AND init parameter error AND |
FALSE |
FALSE |
ParameterError |
- |
- |
|
i_Enable rises AND init parameters ok |
de-bounced DI status |
TRUE |
- |
NO_FUNC |
NO_ERROR |
|
|
MultiTool Creator generated code includes this function block, when the input is selected to be a DI. |
|
|
Location of the POU instance depends on the application: Non-safe inputs are handled in non-safe context, safe inputs are handled in safe context. The example code applies to both. |
|
Definitions: |
|
|
(*NOTE! This object is created by Epec MultiTool Creator*)
VAR_INPUT i_Enable: BOOL := TRUE; i_DI_XM1_03:BOOL; // Input DI value END_VAR VAR_OUTPUT S_o_DI_XM1_03: SAFEBOOL; o_XM1_03_Status_DebounceDI: EPEC_SC.Status; o_EC_XM1_03: EPEC_DITF.EventCode; END_VAR VAR init_ok: BOOL := FALSE; S_1_03_DebounceDI: EPEC_SC.S_DebounceDI;
S_XM1_03_DebounceDelay: SAFEUINT := UINT#30; // ms END_VAR
|
|
|
Init: |
|
|
(*NOTE! This object is created by Epec MultiTool Creator*)
o_EC_XM1_03.DeviceID := DeviceIDs.DigitalInput; o_EC_XM1_03.ChannelID := ChannelIDs.Ch1; o_EC_XM1_03.FunctionID := EPEC_DITF.FunctionIDs.NO_FUNC; o_EC_XM1_03.EventID := EPEC_DITF.ErrorIDs.NO_ERROR;
init_ok := S_1_03_DebounceDI.Init( S_i_DebounceDelay:=S_XM1_03_DebounceDelay, i_FilterType:=EPEC_SC.DebounceFilterType.Debounce_Fast, i_pEventCode:=ADR(o_EC_XM1_03) );
|
|
|
Code: |
|
|
(*NOTE! This object is created by Epec MultiTool Creator*)
S_1_03_DebounceDI( i_Enable:=i_Enable, S_i_DigitalState:=i_DI_XM1_03, o_Status => o_XM1_03_Status_DebounceDI, S_o_DigitalState => S_o_DI_XM1_03 );
|
|
Source file Topic100629.htm
Last updated 4-Sep-2025